

 Completed
CompletedMulti-functional Track Vehicle
PRO Multi-functional Track Vehicle
Multi-functional Track Vehicle
License
:GPL 3.0
Description
Project Description
The crawler chassis, wireless router, high-definition camera, and water gun components in this project are all finished products. Others, including the main control board, rotating pan/tilt expansion board, rotating pan/tilt, etc., are all designed in-house.
Project Related Functions
1. Crawler chassis, with 2 reduction motors as power, has good overall load-bearing capacity, climbing ability and passability.
2. Using L293D as the motor driver, the forward and reverse rotation and speed regulation of the motor can be controlled through PWM.
3. You can use the mobile phone APP to control the crawler vehicle forward, backward, turn left, and turn right. You can also control the steering gear and water gun launch, chassis lighting, and infrared laser turning on and off. At the same time, the crawler vehicle camera can be displayed on the mobile phone in real time. Collected images.
4. The crawler vehicle camera is connected to the chassis through a steering gear and can perform pitching operations.
5. There are two power supplies on the main control board controlled by MOS tubes. One is 5V and the other is 12V (input voltage). In this project, 5V is used to power the infrared laser head, and 12V is used to power the light strip, which can be turned on or off through the mobile APP.
6. Contains a 3.3V to 5V level conversion circuit for driving the WS2812B light strip.
7. Reserve the NRF2401 module interface to facilitate the later use of the remote control to control the crawler vehicle.
8. Reserve an ultrasonic interface for later installation of ultrasonic modules.
9. 4-channel servo interfaces are reserved. This project only uses 2 channels. One channel controls the pitch of the camera, and the other controls the pitch of the water gun.
10. The main control board contains a buzzer circuit for issuing alarm sounds and low-voltage alarms.
11. The car body is equipped with a water gun assembly, which can launch water bombs. The MG996 servo is used to control the pitch, and the orientation rotates with the car body. The water gun is powered by a 2S lithium battery and is controlled by a MOS switch. Double-click the mobile APP screen once and the water gun fires once.
12. An infrared laser head is installed under the barrel of the water gun. The laser head module and 3.3V voltage stabilizing module are packaged in a cylindrical tube and only require 5V power supply.
13. A rotating pan/tilt expansion board is added. This circuit is powered by a 2S lithium battery alone, and a control interface is reserved for connection with the main control board. The circuit includes a DC-DC 5V step-down circuit, an LDO 3.3V voltage stabilizing circuit, 6 MOS-controlled power output circuits (2 3.3V, 2 5V, 2 VIN), and a ULN2003 driver circuit (used to drive 28 stepper motor), and 3-way key switch.
14. The stepper motor rotating pan/tilt uses a 28-inch stepper motor and is connected to the rotating part on the pan/tilt through a hollow turntable bearing. It can be equipped with a water gun or other character equipment. At present, this part of the physical object has been completed and has been powered on for testing. The 360-degree rotation is very smooth. The only problem is that there is a gap between the motor shaft and the upper part of the platform. The fixing screw is blocked by the bearing and cannot be fixed tightly, which affects the water level. Regarding the shooting accuracy of the shotgun, we will not install this gimbal for the time being. We will talk about it later after solving this problem.
Design Principles
1. The system voltage stabilizing circuit adopts a DC-DC step-down circuit with an input voltage range of 4.7V to 28V (this project is powered by 3 18650 batteries) and a maximum output current of 3A. The output voltage in this project is 5V. Provide power to the entire system.

2. The LDO voltage stabilizing circuit uses AMS1117-3.3, which is mainly used to power the microcontroller and some low-power peripherals.

3. The main control uses STM32F103R8T6, mainly because it has many pins and many online resources, making it convenient for development.

4. Use L293D as the motor driver, with voltage input and output, and PWM speed adjustment.

5. Level conversion circuit.

6. Two power supplies controlled by MOS.

7. Buzzer drive circuit.

The following is the circuit of the rotary pan/tilt expansion board.
1. It is also a DC-DC step-down circuit, with a default output of 5V.

2. MOS controlled power output circuit, the output voltage is VIN, one is used for low power output, and the other can be used for high power output.


3. MOS controlled power output circuit, the output voltage is divided into 3.3V and 5V, each with 2 channels.


4. The stepper motor drive circuit uses ULN2003L as the driver chip, which can drive ordinary 28-inch stepper motors.

5. Added 3 key switches to expand some functions that need to be set or started and stopped.

6. Terminals of expansion board. If necessary, use Dupont wire to connect to the main control board.

Software Description
1. Program Part
The program is developed using KEIL software. It mainly uses the serial port to receive the data sent by the wireless router's serial port and parses it, and performs corresponding actions based on the parsed commands. Only part of the content is shown here.
The program has been placed in the attachment, please download it yourself.




2.APP Part
Due to limited capabilities, I directly used the ready-made APP here, searched for wifirobot online, or opened this link to download https://www.muzhijita.com/apk-fk-5020.html

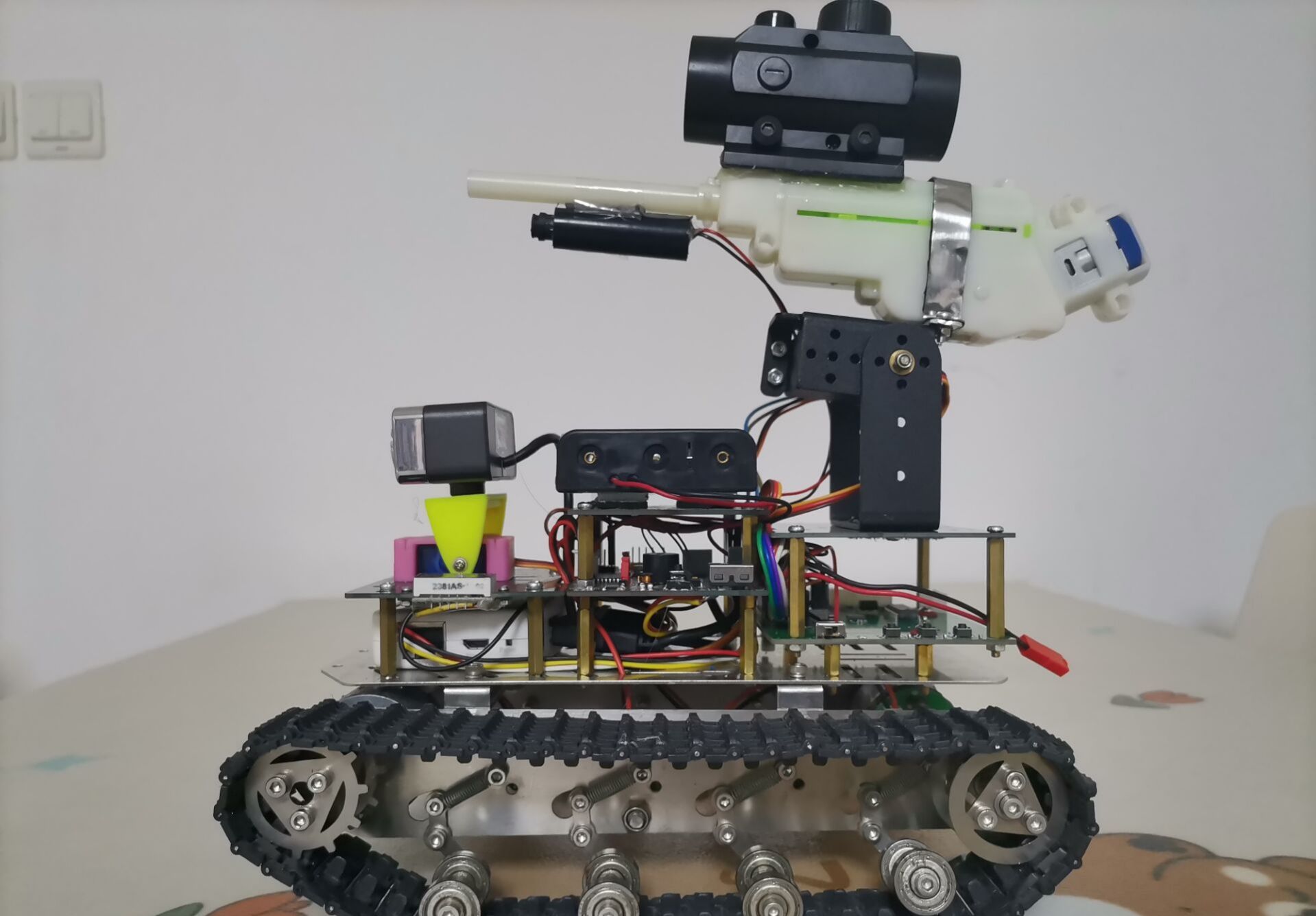
Physical Display




Add a few more photos of the rotating pan/tilt.



Design Considerations
1. Water bombs cannot be fired at people, and water bombs cannot be played with children to avoid accidental ingestion.
2. Do not use infrared laser to illuminate human eyes to avoid damage.
Other
It should be noted that the tracked vehicle chassis for this project, including the wireless router and camera, were purchased second-hand from Xianyu. The corresponding products can no longer be found online. Netizens are not recommended to copy them. In addition, this project uses Xiaor Technology wifirobot APP. Due to the issue of infringement, only relevant web links are provided here, and APP software is not provided. It is recommended that capable netizens develop their own APP.
Designed by myself1820 (from OSHWHub)
Link:https://oshwhub.com/myself1820/wifiyuan-cheng-kong-zhi-de-duo-g
Design Drawing
 Empty
Empty
Comment