

 Ongoing
OngoingLine Follower Robot
STDLine Follower Robot
License
:TAPR Open Hardware License
Description
Overview
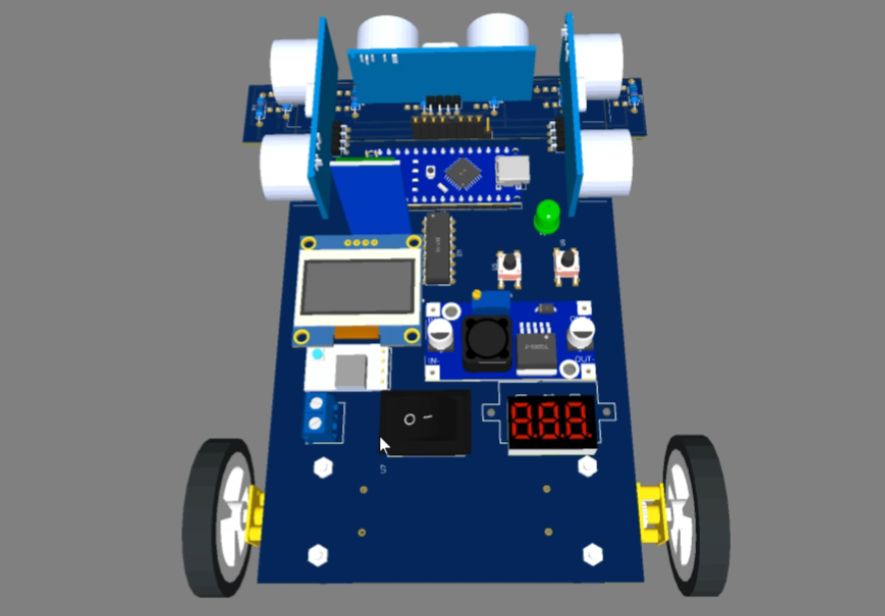
This project entails designing and assembling an advanced line-following robot that incorporates a range of sensors and modules for enhanced functionality. The robot is built around an IR sensor array using TCRT5000 sensors for line detection, complemented by Bluetooth communication, motor control, ultrasonic ranging, and user interaction features. Key components include an L298D motor driver, two N20 motors, three sonar sensors, an Arduino Nano, a 0.96" OLED display, two push buttons, a buck converter, and a boost converter.
Components
- TCRT5000 IR Sensors (6 units): For detecting and following a 2.5-3 cm wide black/white line.
- L298D Motor Driver: Controls the N20 motors, enabling precise movement and direction control.
- N20 Motors (2 units): Provide propulsion and maneuverability to the robot.
- Bluetooth Module: Facilitates wireless communication for remote control and data exchange.
- Arduino Nano: Acts as the main microcontroller, handling sensor data processing, motor control, and user interface.
- 0.96" OLED Display: Displays real-time information about the robot’s status, sensor readings, and other relevant data.
- Sonar Sensors (3 units): Provide obstacle detection and distance measurement to enhance navigation capabilities.
- Push Buttons (2 units): Allow for user input to control and configure the robot.
- Buck Converter: Steps down the voltage for components requiring lower operating voltages.
- Boost Converter: Steps up the voltage for components requiring higher operating voltages.
Design Specifications
- IR Sensor Array: The six TCRT5000 sensors are arranged in a linear configuration to detect the position of the line accurately. The spacing and alignment are optimized for a 2.5-3 cm wide line.
- Motor Driver and Motors: The L298D motor driver controls the two N20 motors, enabling the robot to follow the line with precision. The motor driver receives commands from the Arduino Nano based on the sensor inputs.
- Bluetooth Communication: The Bluetooth module allows for remote control and monitoring of the robot. It enables wireless commands to be sent to the Arduino Nano, which can adjust the robot's behavior accordingly.
- Ultrasonic Sensors: Three sonar sensors are mounted at strategic positions to detect obstacles and measure distances, enhancing the robot’s ability to navigate complex environments.
- User Interface: The OLED display provides a visual interface for the user, showing real-time data such as sensor readings, battery status, and other relevant information. The push buttons allow for manual control and configuration of the robot.
- Power Management: The buck and boost converters ensure stable power supply to all components, maintaining optimal performance across the different voltage requirements.
Operation
- Line Following: The TCRT5000 sensors detect the line by measuring reflected IR light. The Arduino Nano processes these signals and adjusts the motor speeds via the L298D driver to keep the robot on track.
- Obstacle Detection: The sonar sensors continuously monitor the surroundings for obstacles. If an obstacle is detected, the Arduino Nano adjusts the robot's path to avoid collisions.
- Remote Control: Using the Bluetooth module, the robot can be controlled remotely. Commands sent from a smartphone or other Bluetooth-enabled device can change the robot’s speed, direction, or operational mode.
- User Interaction: The OLED display provides real-time feedback, and the push buttons offer a simple interface for controlling and configuring the robot without the need for external devices.
Applications
- Educational Tool: Ideal for teaching robotics, electronics, and programming concepts in a hands-on manner.
- Research and Development: Useful for developing and testing algorithms for autonomous navigation and obstacle avoidance.
- Robotics Competitions: Equipped with advanced features making it suitable for participation in line-following and obstacle avoidance competitions.
This advanced line-following robot, featuring a comprehensive sensor array, Bluetooth communication, and robust control mechanisms, is a versatile platform for education, research, and competitive robotics.
Design Drawing
BOM
 Clone
CloneProject Members
 Empty
Empty
Comment