

 Completed
CompletedThe wheat wheel tank based on the Li chuang Liangshan Pi
PRO The wheat wheel tank based on the Li chuang Liangshan Pi
The wheat wheel tank based on the Li chuang Liangshan Pi
License
:GPL 3.0
Description
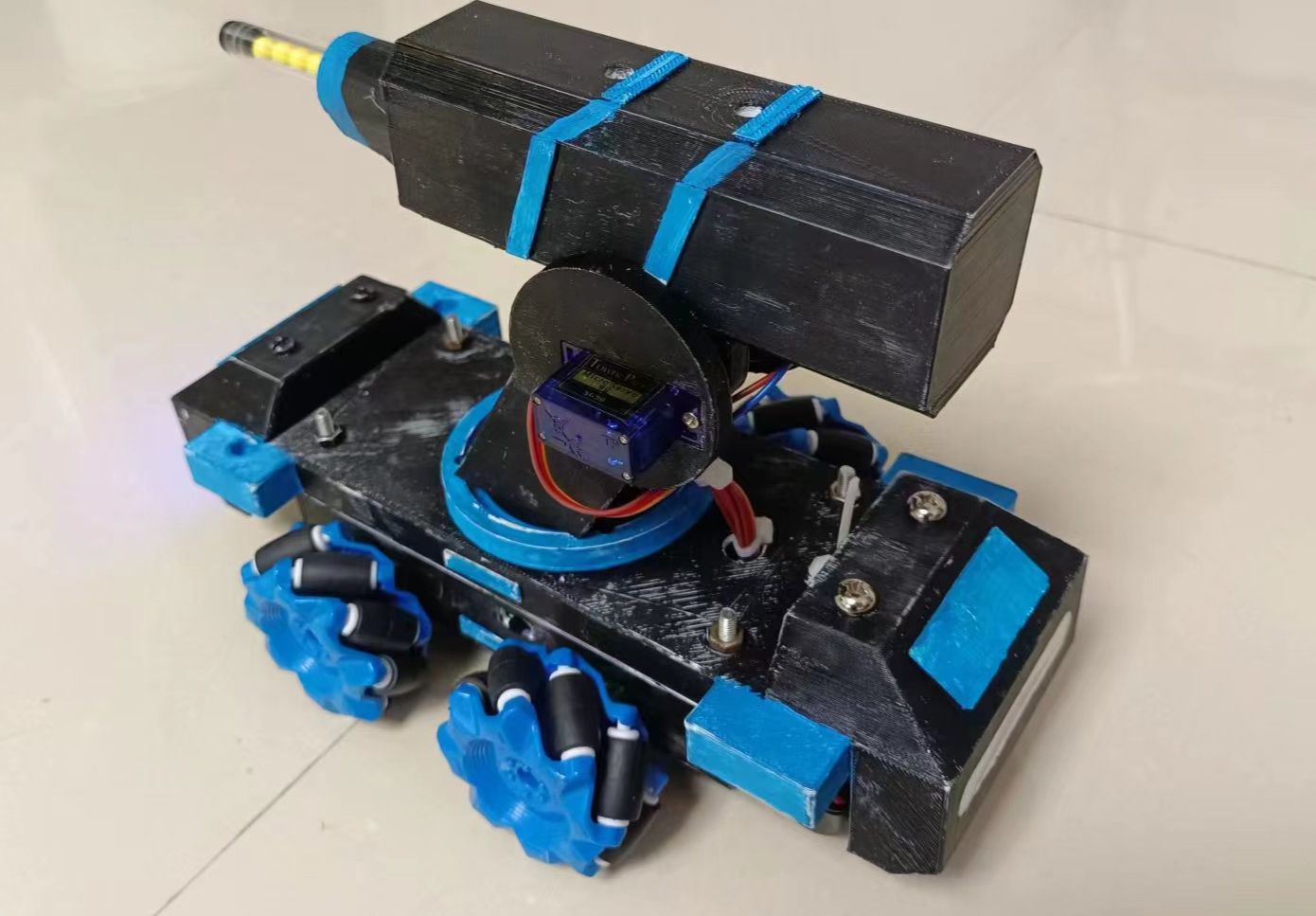
Through this project, you can learn single-chip microcomputer programming and circuit design, and apply practice to make your own "trolley"
Function introduction:
1. Realize the functions of four-wheel wheat wheel trolley walking, differential turning and in-situ turning
N20 motor, A4950 motor drive with Makenamm wheel.


Driven by an A4950 motor, the performance is stronger than that of the DRV8733 and TB6612, with two PWM controls.

Motor drive circuits
Control of the Mecanum Wheel
1. Forward/backward
 When the wheat wheel installed in the above way rotates forward at the same time, the forces on the sides of the front two wheels and the rear two wheels can be canceled out, and only the force on the front side remains. The trolley can move forward.
When the wheat wheel installed in the above way rotates forward at the same time, the forces on the sides of the front two wheels and the rear two wheels can be canceled out, and only the force on the front side remains. The trolley can move forward.
The figure shows the force of lateral movement while moving forward.
Just go back and reverse, and the same goes for analysis.
2. Translate left and right
The principle is to rotate two wheat wheels on the same side of the trolley in opposite directions, so that the forces along the front and rear will cancel out, and the lateral forces will happen to be in the same direction.
 For example, moving to the left will cause all right wheels to be reversed, and the left wheels to be fully forward.
For example, moving to the left will cause all right wheels to be reversed, and the left wheels to be fully forward.
3. Spin
The principle is that one wheel is backward and the other wheel is forward; In this way, for two wheels on the same side, the lateral force can still be cancelled out.
 If the two wheels on the left side rotate forward, the two wheels on the right side can be reversed to make the trolley rotate clockwise, and vice versa
If the two wheels on the left side rotate forward, the two wheels on the right side can be reversed to make the trolley rotate clockwise, and vice versa
It should be noted that although the four wheels rotate in different directions, the speed needs to be strictly the same, otherwise the movement will no longer be accurate.
However, when we need to translate in any other direction, we can decompose the speed of the trolley into the direction on the two axes of xy, calculate the speed of the four wheels by calculating the values of these two sub-speeds, and then superimpose the rotation of these two sets of wheels, and we can restore back to the special trolley speed required at the beginning.
In this way, the speed of the four wheels is no longer the same, and the movement of the car is no longer limited to front and back and left and right, but in any direction you need.
4. Turret rotation and firing
4.1 The turret rotates through two SG90 servos to complete the left, right and up and down direction of the turret. It is controlled by the PWM signal of the PA5 and PB8 ports of the Liangshan Pi.

Servo circuit

4.2 Turret firing
The firing part of the turret was done by a single gearbox.

The Liangshan Pi controls the high and low level output to control the on/off of the triode to realize the control of the transmission.

Battery firing control circuit
PS handle control

PS Handle receiver diagram

Handle receiver circuit diagram
Skill mastery:
Hardware design capabilities
- Learn the ability to analyze the circuit of embedded projects and learn how to understand the schematic;
- Initially learn to master the basic ability of component selection and data sheet reading;
- Learn the working principle of intelligent car and the basic method of embedded circuit design;
- Learn the ability of schematic design and PCB design, and cultivate independent project design thinking;
- Master the skills of component welding and hardware debugging, and become a new generation of "Welding Emperor";
Software development capabilities
-
- Understand the basic functions and use of peripherals of GD32, and get started with GD32 project development;
- Understand the principle of ADC acquisition and realize the voltage acquisition function;
- Understand the principle of PWM and realize PWM control of output with different duty cycles;
- Understand the communication mode of PS handle to realize the control of the whole vehicle
- Master the methods and skills of embedded software development, code reading and BUG debugging;
Problems and solutions
- At first, I couldn't burn it, but then I watched the official tutorial to learn ISP and solved it.
- I would like to take this opportunity to give you a popular science about the ISP upgrade principle, in fact, the chip will run a section of the manufacturer's program before running the user program, the reset is to let the program execute the manufacturer's program from scratch, and the manufacturer's program will detect whether the boot button is pressed, if pressed, it will enter the upgrade mode, so after the reset is released, the boot button still needs to be retained until the manufacturer's program is detected and then released.
Demo video:
Designed by hikn (from OSHWHub)
Design Drawing
 Empty
Empty
Comment