

 Completed
CompletedH743V1.0 Flight Control (OSHWHub Stars) MAVERICK_H743_MK1.0
PRO H743V1.0 Flight Control (OSHWHub Stars) MAVERICK_H743_MK1.0
H743V1.0 Flight Control (OSHWHub Stars) MAVERICK_H743_MK1.0
License
:CC BY-NC-SA 4.0
Description
Project Description
In order to better carry out the development of subsequent UAV projects and the use of flying machines, Sohu developed a high-performance, small-sized flight control based on STM32H743 that is compatible with multiple open source flight control firmware. This flight control is suitable for flying aircraft, fixed-wing, and university scientific research drones. It is mainly used for small four-rotor drones. It can also be used for multi-copter aircraft and basic drone teaching drones. It can also be used for unmanned aerial vehicles. Cars, unmanned boats and other remote control models.
Open Source Agreement
This hardware design is released under the CC-BY-NC-SA 4.0 agreement and is only for DIY learning and communication use by enthusiasts. Any form of commercial use is strictly prohibited . This design is provided as is and does not provide any form of work guarantee/after-sales warranty. We are not responsible for the consequences and joint liability of any damage/damage to the personal property resources of the producer or third parties caused by improper product design, improper operation, or violation of local laws and regulations.
CC-BY-NC-SA 4.0, Creative Commons License-Attribution-NonCommercial-ShareAlike.
CC: Abbreviation for Creative Commons license.
BY: Attribution. You must give appropriate attribution, provide a link to this license, and indicate whether changes were made.
SA: Share Alike , if you remix, transform, or create based on this work, you must share and publish your contribution under the same license as the original license.
NC: Non-Commercial, you may not use this work for commercial purposes.
Project Related Functions
- A UAV controller based on STM32H743VIH6 main control.
- This module is the control board of the flight control and can be used with different electrical equipment to realize low-cost drones.

Maverick_H743_V1.0 flight control configuration is as follows:
- A high-performance ultra-small drone controller
- It uses the STM32H7 series high-performance microcontroller STM32H743VIH6 (480MHZ), which is smaller in size than the STM32H743VIT6, thus further reducing the size of the flight control while maintaining the same flight control performance.
- Dual IMU design (ICM-42688-P+BMI-270) is used to achieve stable flight effects. It makes the flight more stable and the control more precise, making it easy to control whether racing or flying freely at full speed. It also supports replacement with gyroscopes packaged in LGA-14.
- Built-in 5V/2.5A, 9V/2A BEC provides stable and reliable power supply for external peripherals such as GPS, optical flow meter, receiver, magnetometer, and image transmission.
- Built-in 5V/2.5A, 9V/2A BEC provides stable and reliable power supply for external peripherals such as GPS, optical flow meter, receiver, magnetometer, and image transmission.
- The built-in OSD module can display some aircraft-related data in real time on the image transmission interface, making it easier for pilots to control it.
- The built-in TF card interface can store a large amount of flight data at one time, perfectly avoiding the problem of the black box filling up quickly.
- Built-in DPS-310 high-performance barometer, which can sense the aircraft altitude in real time. It also supports replacement with SPL06/BMP280/DPS310.
- Built-in CAN chip.
- Onboard SBUS inverter and active buzzer driver.
- Leads out a variety of interfaces to facilitate connection of different peripherals. UART : 7 channels (1.2.3.4.6.7.8) SBUS : 1 channel (RX2) I2C : 1 channel SPI : 1 channel CAN : 1 channel PWM : 13 channels (10 channels motor, 1 channel light strip, 2 channels servo) ADC : 3 channels (VBAT, Current, RSSl) USB : (Type-C)
 Supported firmware:
Supported firmware:
INAV (adapted)
BF(adapted)
ArduPilot(adapted)
PX4 (adapting)
Enter the Q group to get the latest firmware, QQ exchange group: 940196990 (because the firmware version will always be iterated, here an update to review for a while)

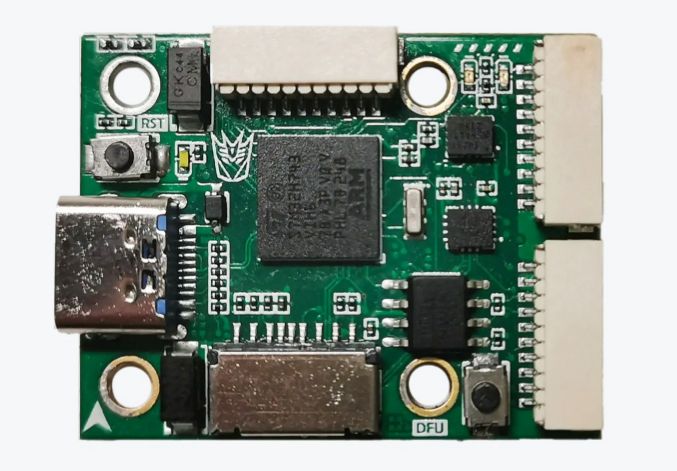
1.Reset button (no need to solder)
2.TVS transient suppression diode
3.STM32H743VIH6 master control
4.Status light
5.Dual IMU
6.CAN chip
7.BOOT0 button
8.TF card
9.LDO
10.SBUS inverter and active buzzer driver
11.Barometer
12.Osd
13.5V buck
14.9V buck
Project Properties
This project is made public for the first time and is my original project. The project has not won any awards in other competitions.
Project Progress
2023/08/08 -- 2023/08/31 The hardware design of this flight control has been completed using Jialichuang Professional Edition.
2023/09/01 -- 2023/09/03 Compare different open source flight control firmware to integrate firmware.
2023/09/05 -- 2023/09/17 Welding circuit.
2023/09/19 -- 2023/09/25 Test flight control related functions.
2024/01/15 -- 2024/00/00 Test flight completed.
QQ communication group: 940196990.
Follow-up plan: continue to test remaining functions.
Design Principles
UAV flight control system (Flight control system) is referred to as flight control and can be regarded as the brain of the aircraft. The multi-axis aircraft's flight, hovering, attitude changes, etc. all use a variety of sensors to transmit the attitude data of the aircraft back to the flight control. The flight control then issues instructions through calculation and judgment, and the actuator completes the actions and flight attitude adjustments.
The UAV flight control system is composed of a variety of hardware and software. The following will introduce each component of the UAV flight control system.
1. Sensor
The sensor is an important part of the UAV flight control system, which can sense the status information of the UAV. Sensors mainly include the following types of sensors:
(1) Accelerometer: used to detect the acceleration and tilt angle of the drone.
(2) Gyroscope: used to detect the angular speed and angle of the drone.
(3) Compass: used to detect the direction of the drone.
(4) Barometer: used to detect the altitude of the drone.
(5)GPS: Used to detect the position and speed of the drone.
2. Controller
The controller is the core part of the UAV flight control system. It can process the information obtained by the sensors and send instructions to the actuators. Controllers mainly include the following types of controllers
(1) Flight controller: used to control the flight attitude, altitude, speed and other parameters of the drone.
(2) Navigation controller: used to control the route and heading of the drone.
(3) Remote control: used to control the take-off, landing, steering and other operations of the drone.
3. Actuator
The actuator is the final execution part of the UAV flight control system. It can control the flight of the UAV according to the instructions of the controller. Actuators mainly include the following types of actuators:
(1) Electronic regulation: used to control the speed of the motor.
(2) Motor: used to control the flight of the drone.
(3) Steering gear: used to control the steering of the drone.
4. Software
The software of the UAV flight control system mainly includes the following types:
(1) Flight control software: used to control the flight of the drone.
(2) Navigation software: used to control the route and heading of the drone.
(3) Ground station software: used to monitor the status of the drone and control the flight of the drone.
The UAV flight control system is the core control system of the UAV. It can automatically control the flight attitude, height, speed and other parameters of the UAV, so that the UAV can complete various tasks. The system is composed of a variety of hardware and software, including sensors, controllers, ESCs, motors, etc. UAV flight control systems have a wide range of applications and can be used in agriculture, marine, firefighting, search and rescue and other fields, and have important application value.
This flight control mainly draws the schematic diagram based on the pin definition configuration in the flight control firmware. The high-performance STM32H743VIH6 is selected as the processor main control. The relevant gyroscope uses the currently more cost-effective BMI270 and ICM42688-P, and Use a dual gyroscope layout for the PCB layout, and use DPS310 for the barometer. For the selection and parameters of the relevant sensor modules, see Maverick_H743_V1.0 flight control configuration and accessories. In addition, the flight control was designed to take into account the need for external GPS, compass, receiver, airborne computer, visual processing module, image transmission camera and other equipment for future development, so the SH1.0 interface was used to derive relevant serial ports, I2C, and SPI.
Software Description
Software is used on the market open source flight control firmware, the flight control compatible.
INAV (adapted)
Betaflight (adapted)
PX4 (not adapted)
ArduPilot (adapted)
For the source code and ideas of relevant flight control firmware, please go to the open source addresses of these firmwares and will not go into details here.
Physical Display


Demo Video
Video Link:
The test flight video will be uploaded to Station B later.
Design Considerations
Several points that need to be noted during production:
1.It is difficult to reproduce this project. The smallest part uses 0201 package and BGA chip. It is difficult to weld. It requires a lot of patience (it may require multiple debuggings or even crashing the machine), as well as good learning ability to be able to pass different processes. Solve the difficulties encountered in various ways, including but not limited to soldering, flashing firmware, and using firmware reasonably. Therefore, it is only recommended for model friends who have played with drones and are proficient in welding patch components and have a certain understanding of PCB and components to reproduce. If conditions permit, you can open a steel mesh and use an air gun to weld (see the attachment for the steel mesh gerber file) ). Please fully consider your hands-on and problem-solving abilities before choosing whether to reproduce.
2.Selection of power supply voltage: The theoretical maximum input of this ESC is 30V. To reserve margin, it is recommended to use 3~6s model aircraft batteries or 18650 or 21700 battery packs for power supply.
3.Selection of components: The filter capacitor needs to be selected according to the input voltage (it is recommended that the capacitor be purchased at Lichuang Mall, as TB false markings are common).
4.When welding, please use silicone wire (28~30AWG) to connect the flight controller to prevent the pad from falling off due to force.
5.It is recommended to use some hot melt glue to fix the six 10P SH1.0 interface sockets after soldering to prevent the pads from falling off due to force.
6.Pay attention to the line sequence! Pay attention to the line sequence! Pay attention to the line sequence!
7.The component cost of the entire project is about 120 yuan. But note that flight control costs often only account for a small part of the cost of the entire drone.
8.For flight control firmware burning, if you are burning BF firmware, it is recommended to burn the universal HEX in the attachment. After the burning is completed, CLI inputs the pin configuration file in the attachment. Press and hold the BOOT button, connect the flight controller USB to the computer, release the BOOT button, and enter DFU mode. Then use Betaflight Configurator or other ground stations to burn. Please use INAV ground stations to burn APM firmware. (See attachment for firmware) If it is INAV or APM firmware, the next step is to configure and adjust parameters in the ground station. If it is BF firmware, you also need to flash a specific configuration file in the CLI command line. (See attachment for BF configuration file)
Wiring Instructions
For detailed interface lead-out and peripheral wiring, please refer to the following two figures:


Other
I would like to say a few words:
This flight control is carefully designed by the author himself, and it is definitely not a shoddy thing. The layout and routing optimization and revision in the flight control have been iterated for several generations. If you have any good suggestions, you can leave a message in this comment area or station B (participate in the iteration V2.0)
The welding of this H7 flight control still requires some proficiency. There are BGA and 0201. It is recommended that those with basic welding skills can try prototype welding. In addition, it is recommended that people with basic experience in traversing machines or drones and stm32 can develop it.
At this stage, the flight controller has been driven (Shanying is driving it). If you want to drive by yourself, please contact the author in advance. Self-driving cars must be profitable. (Bilibili: @逸灏Yihao)
QQ communication group: 940196990.
PS: Now the V2.1 version has been designed, you can watch the latest video introduction of Station B.
Feel good, three even support it or you can give a reward (hee hee, more support more power)

Reference:
The front layout of the flight control refers to the open source NxtPX4 of HKUST-Aerial-Robotics (https://github.com/HKUST-Aerial-Robotics/NxtPX4), and the relevant pin definitions refer to MATEKH743-WING.
Testing completed:
①Dual IMU
②Barometer
③Multiple ways to enter DFU
④OSD
⑤All power supply parts
⑥GPS
⑦Control the homemade four-in-one ESC based on AM32 firmware [Open Source] Homemade AM32 four-in-one ESC - single-channel motor drive test_bilibili_bilibili
Designed by Yihao6767 (from OSHWHub)
Design Drawing
 Empty
Empty
Comment