

 Completed
CompletedFoot Wheel Robot
PRO Foot Wheel Robot
Foot Wheel Robot
License
:GPL 3.0
Description
Project Description
The wheeled robot, inspired by the Ascento robot, is low-cost, cost-effective, and has remarkable functions such as self-balancing, walking up and down steps, and jumping, all of which are also implemented in this project.
Open source agreement
This project uses the CC-BY-NC-SA 3.0 open source license, which is the Creative Commons License-Attribution-NonCommercial-ShareAlike.
CC : Creative Commons License
BY : Attribution. You must give appropriate attribution, provide a link to this license, and indicate whether changes were made.
SA: Share Alike, if you remix, transform, or create based on this work, you must share and publish your contribution under the same license as the original license.
NC : Non-Commercial, you may not use this work for commercial purposes.
Project related functions
Self-balancing function, fast movement, maneuverable steering, bouncing over obstacles, sideways tilt, height adjustment, height adjustment, WiFi remote control, PS4 controller Bluetooth wireless remote control, wireless parameter adjustment, parameter return and display, etc.
Project properties
This project is made public for the first time and is my original project. The project has not won any awards in other competitions.
Project progress
1. The main control board hardware schematic design and PCB design inspection are completed.
Reserved interfaces: mpu6050 interface, oled interface, reserved serial port, reserved io. In order to improve the completion rate of the system, interfaces are reserved for some circuit designs, which can be used as alternative interfaces when problems arise in the original circuit design.

2. The main control board has been proofed and the hardware functions have been debugged and the expected functions have been basically achieved. The hardware debugging is as follows:
1) The D+ and D- of the esp32 usb are connected reversely. After exchanging them, the function is normal.
2) The IIC of mup6050 is not connected to the pull-up resistor, but it functions normally after the pull-up resistor is connected.
3. The structural design has been completed, and the next step is to prepare for proofing.

4. The hardware is improved and the improvements are as follows:
Modification record: 3.0
1. D+ and D- of esp32 usb are connected reversely, which has been modified.
2. The IIC of mup6050 is not connected to the pull-up resistor and has been modified.
3. 3.3v from other places is very unstable. 3.3v needs to be stepped down from the circuit board. Connect 7.2v to 5v, cancel the 5v voltage, and transfer 7.2v to the 3.3v voltage regulator chip. It has been modified.
4. The servo pwm needs to be connected to a pull-up resistor, otherwise during reset, the servo will suddenly return to zero due to low level. It has been modified.
5. D2_LED network label is wrong, it should be D23_LED, it has been modified.
6. The 5v voltage from the foc motor is not enough current, so the 5v network label is canceled, 7.2v is connected to 5v, the 5v voltage is canceled, and 7.2v is transferred to the 3.3v voltage regulator chip. Completed.
7. Cancel USB ID pin configuration, modified.
8. Cancel the backup interface, modified.
9. Cancel the 7.2V enable control ENA, modified.
10. Cancellation of the three electrostatic discharge (ESD) protection devices of usb1 has been completed.
11. U6_TX and U6_RX of CN1 are incorrectly marked as U2_TX and U2_RX.
12. Each pin of the interface should be printed with standard silk screen as much as possible, or the interface connection direction should be marked.

5. The structure has been further improved:
1) Strengthened the structural strength of the leg parts.
2) The position of the battery is adjustable, allowing the zero position to be changed.

Design principles
The hardware design is as follows:
The power supply adopts three-section 18650, which can provide 12V voltage and 3000mAh capacity. 12V can directly power the foc motor, and the foc motor outputs 5v to power the main control board, thus saving the 12-to-5v power supply circuit. The 12v to 7.2v DC/DC chip TPS5450DDAR is used with a maximum current of 5A to power the steering gear.
The main control chip uses stm32f407, and esp32 provides wireless remote control function. You can use wifi to control and adjust parameters, and you can use the PS4 controller to connect to its Bluetooth for remote control. The reason for not using esp32 directly as the main control is that its compilation and programming speed is too slow and unbearable.
- STM32 can be written using jlink, even with the arduino framework, stm32 is fast enough to compile under vs code's platformio platform.
- IMU: Use mpu6050 to communicate through iic and stm32.
- OLED: Use 0.91-inch OLED screen to communicate through iic and stm32.
- EEPROM: Using AT24C04 to communicate via iic and stm32.
- FOC motor interface: The FOC motor uses the simplefoc 2805 motor as the wheel power. The FOC motor can greatly improve the balance ability of the robot.
- Servo interface: Use a 20kg servo as leg power. The large-power servo is intended to achieve changing the center of gravity, left and right balance and bouncing.
- Programming debugging interface: stm32 swd interface and a debugging serial port.
- Power detection: one ADC channel of stm32.
- Micro USB 5V&USB-UART: esp32 programming and debugging circuit.
- 5V to 3.3V: Power supply for stm32, esp32, mpu6050 and other chips.
There are multiple 5v power supplies in the circuit, and BAT760-7 diodes are used to protect the circuit.
The structural design is as follows:
1) Controlling weight means losing weight.
2) Realize circular and linear motion of the legs.
Software Description
This project is developed using VSCode+PlatformIO, and uses the arduino library+FreeRTOS operating system to create multi-task management functions.
1.STM32 main control function: For the car body whose center changes with the movement of the legs, its balance and forward steering control use multiple LQR controllers. The LQR controller can greatly improve the robot's balance ability and control effect.
2. ESP32 wireless function: The wireless function can be used for parameter adjustment and remote control via wifi using the Lunqu Technology mobile app, or can be controlled via Bluetooth via the ps4 controller.
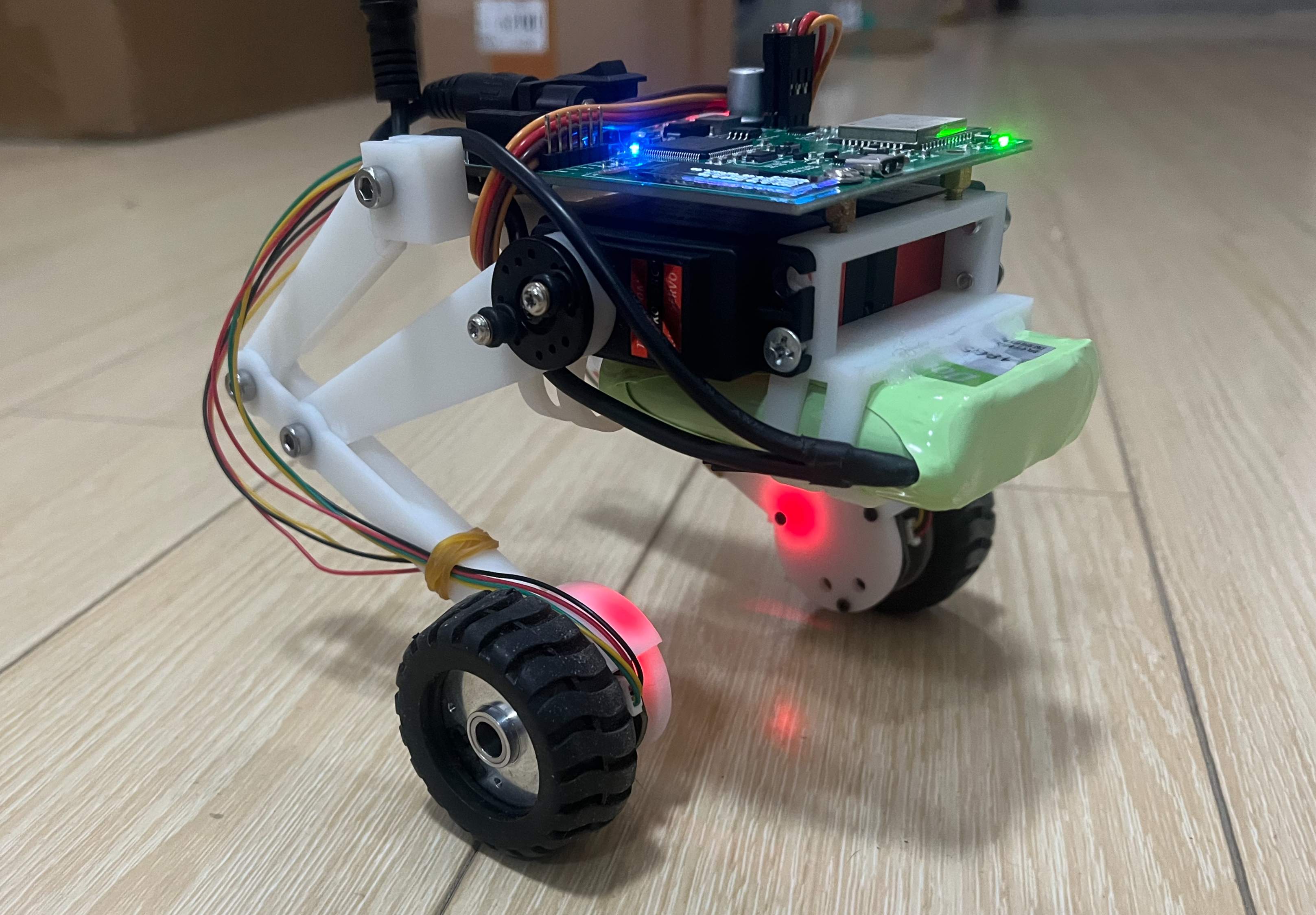
Physical Display
Main control board.

Wheel robot.


Design Considerations
The ps4 controller cannot be connected to other devices such as ps4 or mobile phones during project debugging. Otherwise, the ps4 controller will not be able to connect to the esp32 unless a new esp32 chip is replaced (the reason is unknown).
Other
The main control program and wireless program source code, structural model files, and 3D printing files in this project have all been open sourced in the attachment, and they are all final versions.
The mobile phone debugging remote control app in the project: Link: https://pan.baidu.com/s/1gNYY2oHdPqBM7ljvdAj2Vw Extraction code: xjh6
The core technical points of the project lie in the FOC motor and LQR algorithm.
Most of the functions have been implemented and shown in the demonstration video, and the jumping ability will be debugged in the future.
Other demo videos and data: https://www.bilibili.com/video/BV19w411r7s1/?vd_source=b308842dab6371bccb1b4b5030895bf6
Other information: https://gitee.com/yigelunzi/wheel-legged-robot.git
Designed by yigelunzifeixiang (from OSHWHub)
Design Drawing
Intellectual Property Statement & Reproduction Instructions
This is an open-source hardware project. All intellectual property rights belong to the creator. The project is shared on the platform for learning, communication, and research only; any commercial use is prohibited. If your intellectual property rights are infringed on EasyEDA, please notify us by submitting relevant materials in accordance with the Rules for Complaints and Appeals of IPR Infringement.
Users must independently verify the circuit design and suitability when replicating this project. All risks and consequences are borne by the user, and the platform assumes no liability.
 Empty
Empty
Comment