

 Completed
Completedrobot localisation sensor disk
License
:MIT License
Description
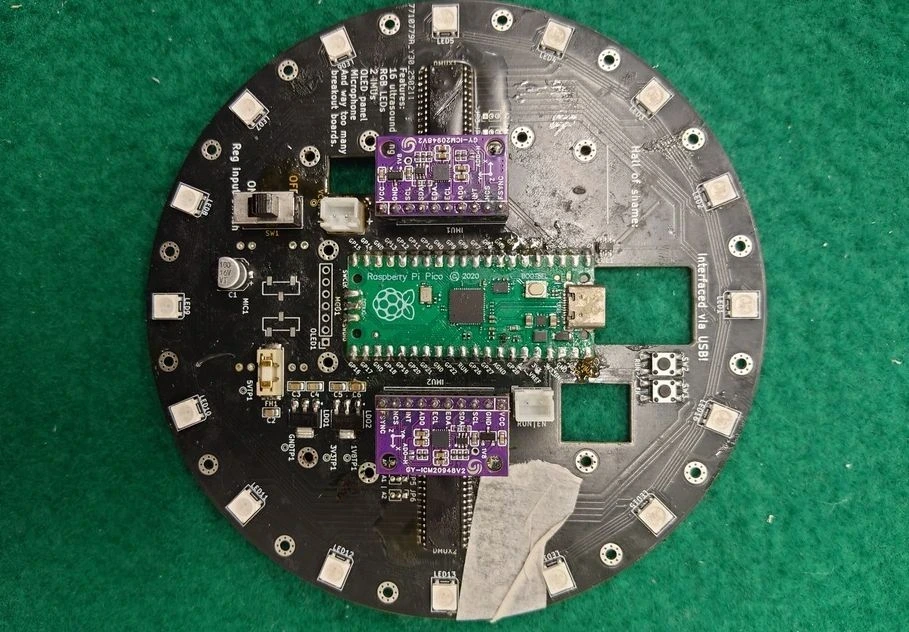
Robot sensor module
This project is a compact sensor module (fitting in a circle of only 124mm diameter) that houses a rich array of sensors to satisfy all your robot environment localisation needs!
On the outside, there is a ring of 16 FFC connectors that connect to a seperate ultrasonic module built on the CH201 sensor. The tiny form factor of these ultrasonic sensors, their high operating frequency (85KHz), and the easily expandable I2C interface, enable them to be closely packed together in a ring to create a map of the distances in the environment. They can also have custom shaped acoustic interfaces to change their field of view behavior, and thresholds can be set in their firmware to optimise for performance in your specific environment. Ultrasonic sensors also work for all objects unlike LiDAR sensors, which are affected by inteference from reflective or transparent objects. This makes CH201 modules the ideal choice for ToF sensors in robotics. The ring array of these modules enable a highly reliable and consistent map of the environment to be generated, from which obstacles can be detected and the robot's position and orientation be calculated. This is a huge upgrade from many robots that only rely on an inertial measurement unit (IMU) to localise, as they drift very easily.
The CH201 array has one weakness: it's low refresh rate and (comparatively to the IMU) low resolution. Thus, we also added a BNO085 breakout board to the mix. This IMU is known for its good performance and (comparatively) low drift, which is ideal for fine control of the robot while the ultrasonic sensor array can provide more reliable data.
The module takes 5V power, which should be readily available in most robots, and can be interfaced through UART (for reliable communications), SPI (for higher speeds), or wirelessly. Circuit protection on the PCB is taken seriously, with decoupling capacitors at all crucial locations. The microcontroller used is an ESP-32, which also has wireless functionality that can aid debugging and act as the communication if running wires is inconvenient, or used for retrofitting into an original design that does not have spare exposed UART or SPI channels.
Thanks to the generous support from OSHWLab, the project has been completed! It has localisation accuracy to +-5mm, and works very reliably!
Design Drawing
BOM
 Clone
CloneProject Members
 Empty
Empty
Comment