

 Completed
CompletedBLDC driver v4
STDBLDC driver v4
License
:CC BY-NC-SA 4.0
Description
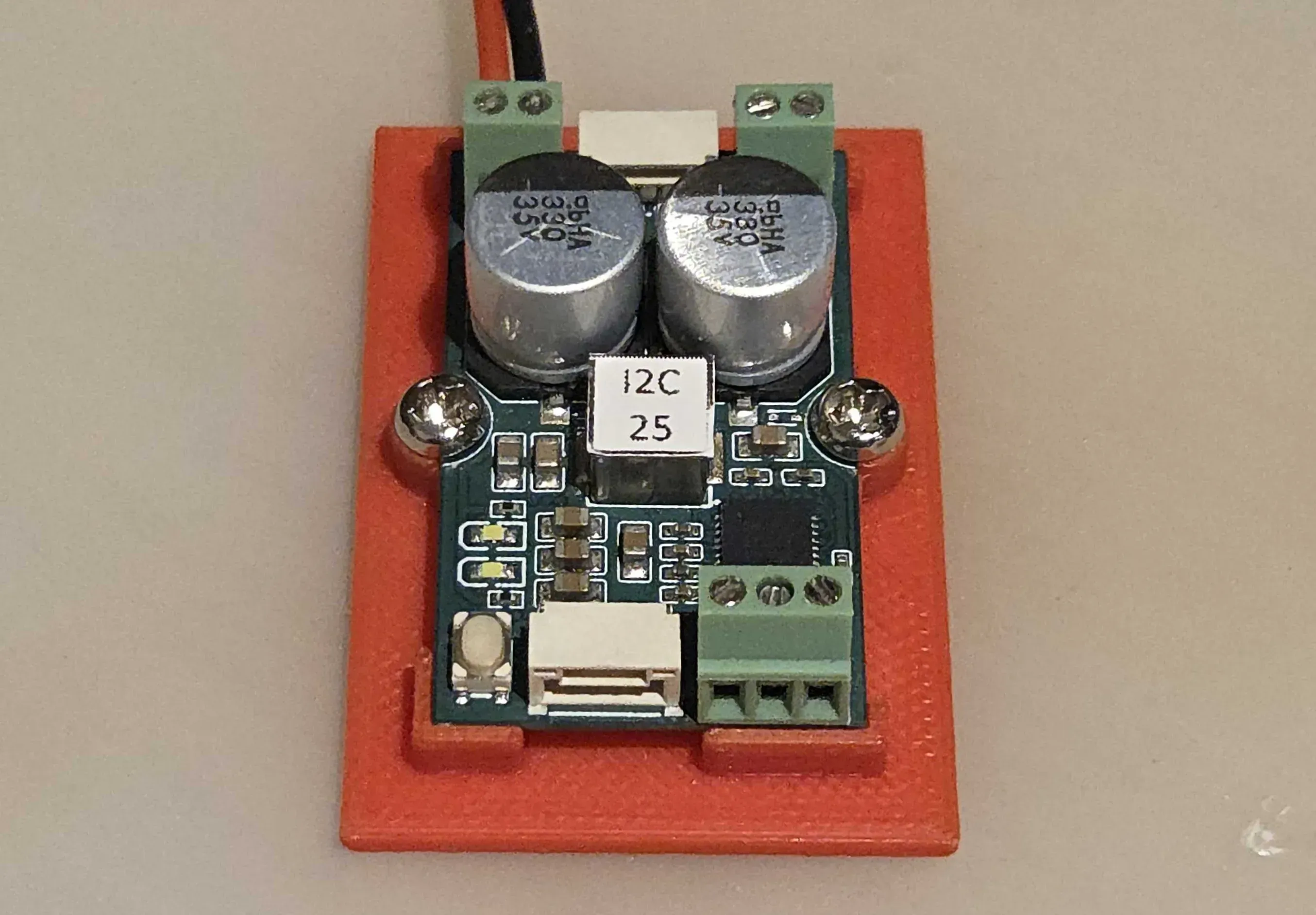
Powerful BRUSHLESS Motor Driver version 4 is a small brushless motor driver intended to drive motors up to 100W, a great fit for many robotics projects. Screw terminals are used for the power input, debug port, and motor power connector. JST GH connectors are used for the I2C port and motor sensor port, which supports sin/cos encoders. The I2C port and motor sensor port can provide up to 5mA current at 3.3V. Mounting holes for M3 screws are included for easy mounting.
The version 4 design is a low cost design, while version 5 is optimised for high performance, small size and has more features.
The PCB design linked is the Special Edition designed to be produced in small quantities using JLCPCB 8 Layer $2 Special offer. Please follow the layer order in the document layer for 8 Layer PCB to achieve best performance. In case mass production is required and cost is prioritised over small performance gains, please delete layers named Inner3 to Inner6. These layers are 3 power planes and 1 ground plane, which is not absulutely necessary for proper function but help with power handling and thermals. In this case, the layer order should be Top -> Inner1 -> Inner2 -> Bottom. For 4 layer PCB inner layers should use 1oz copper.
The PCB thickness should be 0.8mm for best thermal and electrical performance, however this may result in flexing of the PCB if not handled carefully.
Board dimensions: 24mm x 40mm, thickness 15mm
Input voltage: 6-25V (6S LiPo OK)
Continuous output current: 5A or 3.5A RMS (with good cooling)
Peak output current for 1 second: 8A or 5.6A RMS
Design Drawing
BOM
 Clone
CloneProject Members
 Empty
Empty
Comment